

The CAVForth buses operate to SAE Level 4 Autonomy, which means that they are able to operate safely within their ODD without human intervention, even if there is a system fault. This is achieved by building in redundant steering and braking systems that take over if the primary systems should ever have a problem. The safety driver is never expected to have to take control of the vehicle whilst it is in autonomous mode.
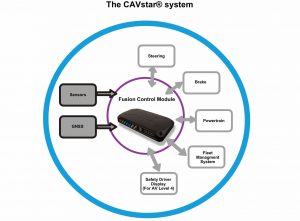
The CAVstar system is designed to identify other road users, such as cars and cyclists and tracks them as them move close to the bus to ensure there are no collisions. The optical cameras, lidars and radar also scan either side of the road for potential pedestrians that may be about to step off the pavement.
Tested over thousands of miles, CAVstar is one of the safest and most reliable automated driving systems available.
![]()
THE CAVFORTH BUS
Fusion Processing has developed state-of-the-art technology to autonomise vehicles and improve the safety of vulnerable road users.
![]()
TEAM WORK
CAVForth is is comprised of a consortium of partners to build, test and deliver an autonomous scheduled bus service.

Ambitious and complex CAVForth autonomous bus service launches in Scotland controlled by Fusion Processing’s Automated Drive System
CAVForth is one of the most ambitious and complex autonomous bus trials worldwide. The project...Continue reading

UK’s first full sized fleet of autonomous vehicles to be launched in May
Buses will be in operation across the Forth Road Bridge from 15 May 2023 ...

First Glimpse of UK’s First AV Level 4 Full-Sized Autonomous Bus Service
Bristol, UK – November 19th: Fusion Processing Ltd today announced that in partnership with Stagecoach,...Continue reading